本文前半部分参考 参考文献1,推荐大家看博客原文。
Position encoding总结
在 上一篇blog 中, 我们介绍了 Attention 的两个性质,也就是在不加 position encoding 的情况下,Attention 对于 query 是 permutation equivariant 的,对于 key 和 value 是 permutation invariant 的。
但是“我爱你”和“你爱我”这两句话所表示的含义应该是不一样的,我们将这两句话作为 key 和 value 的时候,我们发现模型的输出是一致的,这显然是不能接受的。因此,我们就需要加入 position encoding,让模型学习到语序信息,从而明白不同的语序有不同的含义。
下面是测试代码 (来自 参考文献1)
| |
Position encoding 可以分为绝对位置编码 (absolute position encoding, APE),相对位置编码 (relative position encoding, RPE) 以及可学习的位置编码。可学习位置编码主要是 BERT 类的模型在使用,其训练成本比较高,本文不做讨论。绝对位置编码是原始 transformer 里提出的编码模式,现在的大多数基于 transformer 模型使用的都是相对位置编码。
本文中,我们先介绍位置编码应该具有的性质,然后我们分别介绍绝对位置编码和相对位置编码,我们将着重关注苏剑林老师提出来的 RoPE。
位置编码
在介绍位置编码之前,我们首先应该关注位置编码的性质,位置编码的目标是为输入的 token embedding 增加位置信息,那么理想的位置编码应该是怎么样的呢?
我们这里直接引用 参考文献1 中给定的性质:
- 性质 1: token sequence 中每个位置的位置编码都是唯一的。这个很好理解,如果不唯一的话,那么根据前面推导的性质,这两个位置的 attention 输出就完全一致了
- 性质 2: 线性相关性。也就是说,如果我们知道了位置 $p$ 处的位置编码,那么理想情况下,我们应该能比较简单地得到 $p+k$ 处的位置编码,理想情况下,我们应该有 $PE(p+k)=W_kPE(p)$.
- 性质 3: 泛化到长上下文中去。我们希望位置编码不仅在 8K 的上下文起作用,还希望位置编码能够泛化到 32K 的上下文
- 性质 4: 生成模式是固定的。固定的模式有助于模型更好地学习位置相关的信息
- 性质 5: 可以扩展到多维。我们希望位置编码可以从文本扩展到图片再到视频,也就是从 $1D$ 到 $nD$.
绝对位置编码
绝对位置编码依照其名称,其思想就是为每个位置的 token 分配一个固定的位置信息,也就是对于输入的 hidden states $\bm{x}=[\bm{x}_1,\dots,\ \bm{x}_m]\in\mathbb{R}^{m\times d}$, 我们有
$$ \bm{x}_i' = \bm{x}_i + p_i, i=1,\dots, m $$这里,$p_i\in\mathbb{R}^d$. 我们的 attention 就变成了
$$ \mathrm{Attn}(X) = \mathrm{softmax}\left(\frac{(Q+P)(K+P)^T}{\sqrt{d}}\right)V\in\mathbb{R}^{m\times d} $$这里
$$ P = [p_1,\dots,p_m]\in\mathbb{R}^{m\times d}, Q= W_QX\in\mathbb{R}^{m\times d}, K=W_KX, V=W_VX\in\mathbb{R}^{n\times d} $$整数位置编码
一个最简单的想法就是我们使用正整数来标记 token 所在的位置,也就是
$$ PE(i) = [i, \dots, i]=i\mathbf{1}_{d\times 1}\in\mathbb{R}^d,\ i=1,\dots,m $$可以看到,这个简单的设计满足性质 1,性质 2,性质 3,性质 4.
但是,注意到 attention 的输入 $X$ 通常是经过 Layer Normalization 处理过后的,因此其按列符合正态分布,并且均值和方差一般较小。当我们加上整数位置编码之后,其 token 本身的信息就会被污染,也就是信噪比非常低。一个解决方法就是我们对 $PE(i)$ 进行 normalization,即
$$ PE(i)' = \frac{1}{m}PE(i) = \frac{i}{m}\mathbf{1}_{d\times 1} $$现在所有的位置编码的值都比较小,但是我们发现新的位置编码不满足性质 2 了,这是因为现在位置编码还和 sequence 长度有关,我们从位置 $p$ 到位置 $p+k$ 不仅取决于 $k$ 还取决于 sequence 长度 $m$
二进制位置编码
既然整数位置编码的主要问题是对输入影响太大,我们能否找一个不影响输入的整数位置编码方式呢? 参考文献1 提出了二进制位置编码,因为每个 token 是 $d$ 维的,因此我们可以使用 $d$ 位二进制来表示 $i$. 比如说,当 $d=3$, $m=4$ 时,我们的位置编码分别为
$$ PE(0) =p_{(000)_2} = [0, 0, 0],\ PE(1) =p_{(001)_2}= [0, 0, 1],\ PE(2) =p_{(010)_2} = [0, 1, 0],\ PE(3) =p_{(011)_2} = [0, 1, 1] $$现在,我们二进制位置编码满足性质 1,性质 2. 对于性质 3,由于 $d$ 位二进制的表示范围为 $[0, 2^d-1]$,因此其泛化性受到 $d$ 的影响。
参考文献1 画出了不同位置的值的变化情况。我们这里也模仿绘制出类似的曲线图
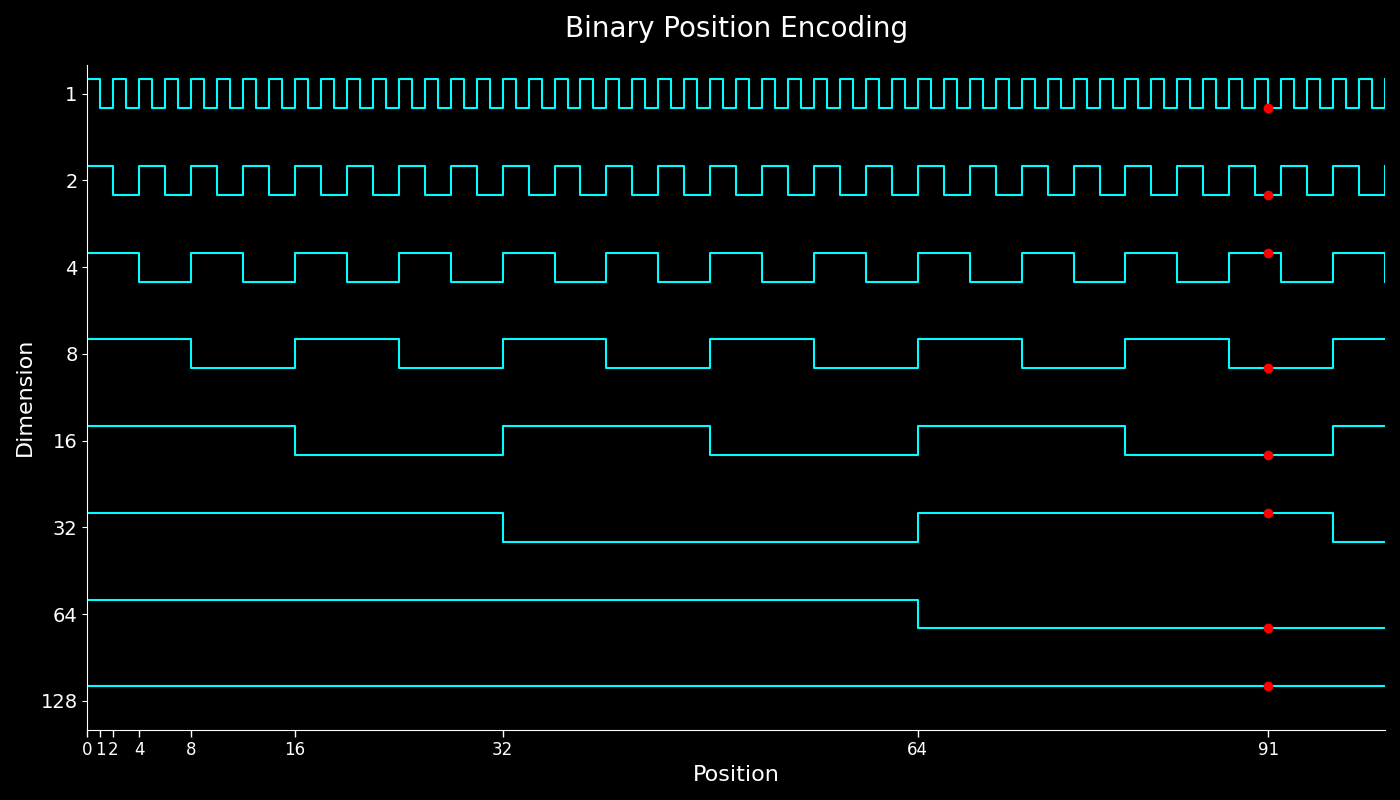
我们发现,二进制位置编码高位,也就是 $PE(i)_{d}$ 的变化很慢,而低位,也就是 $PE(i)_{0}$ 变化很快,
二进制位置编码解决了整数位置编码的信噪比过低和线性相关性。但是其问题是其对不同位置的 token embedding 产生的影响是不一样的。比如位置 1 和位置 2 的相同的 token embedding 之间的区别是:
$$ (\bm{x}_2 + PE(2)) - (\bm{x}_1 + PE(1)) = (\bm{x}_2-\bm{x}_1)+ [0, 1, -1] $$一般来说, $\bm{x}_2-\bm{x}_1$ 比较小,因此使用二进制位置编码的问题是输入位置的微小变化(增加一个 token 或减少一个 token)都会对最终结果产生巨大影响。因此,我们需要想办法解决这个问题。
Sinusoidal
前面提到二进制位置编码的问题是相邻 token 之间变化太大,不够光滑。因此我们想要增加一个光滑性质,也就是说我们希望:
- 位置编码值在 $[-1, 1]$ 之间,防止对 token embedding 产生影响
- 相邻 token 的位置编码尽可能相近,即 $|PE(k+p)-PE(p)| \leq \delta |k|$, 其中 $\delta>0$ 是一个比较小的数。
- 与二进制一样,高位的变化比较慢,低位的变化比较快
一个想法就是利用三角函数 $\sin$ 或者 $\cos$,三角函数满足前两个性质, 对于第三个性质,我们可以通过控制频率来满足。这样我们得到的位置编码就具有如下形式:
$$ PE(p, i) = \sin\left(\frac{p}{\theta^{i/d}}\right) $$其中 $\theta$ 是我们的超参数。
我们现在来推导一下上面位置编码的线性相关性:
$$ PE(p+k) = \sin\left(\frac{p+k}{\theta^{i/d}}\right)=PE(p)\cos\left(\frac{k}{\theta^{i/d}}\right) + \cos\left(\frac{p}{\theta^{i/d}}\right)\sin\left(\frac{k}{\theta^{i/d}}\right) $$我们发现,$\sin$ 位置编码不满足线性相关性。但是出现的 $\cos$ 给了我们启发,也就是我们可以同时使用 $\sin$ 和 $\cos$ 来完成位置编码,这也是原始 transformer 里提出来的 Sinusoidal 位置编码,其形式为:
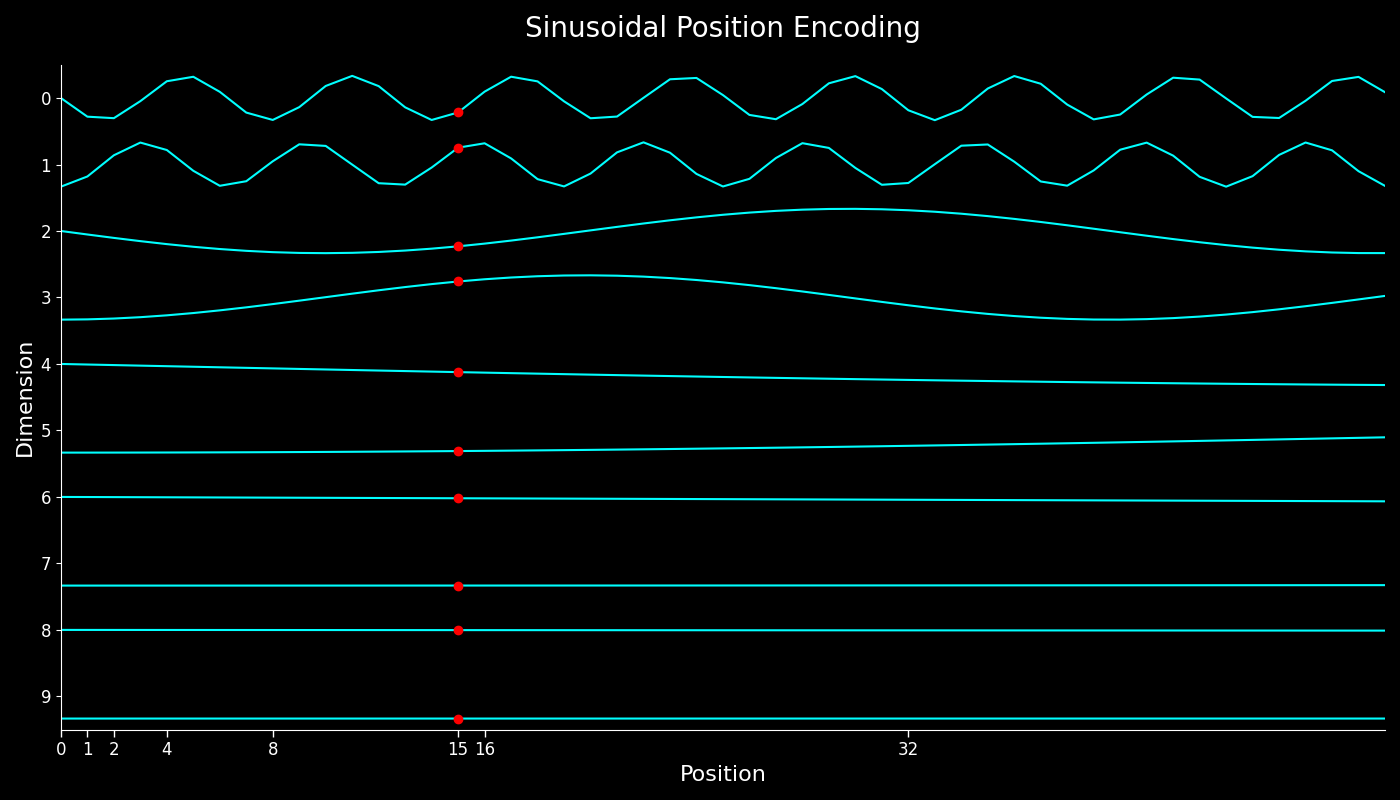
$$ \begin{aligned} PE(p, 2i) &= \sin\left(\frac{p}{\theta^{2i/d}}\right)\\ PE(p, 2i+1) &= \cos\left(\frac{p}{\theta^{2i/d}}\right) \end{aligned} $$现在,记 $\omega_i=1/\theta^{2i/d}$, 我们再推导一下线性相关性,就得到:
$$ \begin{aligned} \begin{bmatrix} PE(p+k, 2i)\\ PE(p+k, 2i+1)\\ \end{bmatrix}&=\begin{bmatrix} \sin \omega_i(p+k)\\ \cos \omega_i(p+k) \end{bmatrix}\\ &=\begin{bmatrix} \sin \omega_i(\omega_ip)\cos(\omega_ik)+\cos w_i(\omega_ip)\sin(\omega_ik)\\ \cos \omega_i(\omega_ip)\cos(\omega_ik)-\sin w_i(\omega_ip)\sin(\omega_ik) \end{bmatrix}\\ &= \begin{bmatrix} \cos(\omega_ik)& \sin(\omega_ik)\\ -\sin(\omega_ik)& \cos(\omega_ik) \end{bmatrix}\begin{bmatrix} PE(p, 2i)\\ PE(p, 2i+1)\\ \end{bmatrix} \end{aligned} $$也就是说,Sinusoidal 位置编码满足线性相关性。对于 Sinusoidal 位置编码我们也可以进行可视化:
相对位置编码
前面介绍了绝对位置编码,每个位置的位置编码是固定的。但是绝对位置编码的问题是,模型比较难以学习相对位置关系。
举个例子,我们提到上下文时,通常会使用“上一节”,“上一章”这些表示相对位置关系的词。
因此,我们希望让模型学习相对位置关系而不是绝对位置关系,因为相对关系更符合我们的认知。
RoPE
RoPE 由苏剑林老师提出,最早应用于 LLaMA 架构(没有确认),后续被大多数模型所采用。
之前的 PE 大多数关注于加性位置编码,也就是假设位置编码的形式为 $\bm{x}+\bm{p}$, 基于这种假设,已有的工作基本都集中于优化下面的 Q 和 K 的内积
$$ \langle f_q(\bm{x}_q, m), f_k(\bm{x}_k, n) \rangle $$这里 $f_q(\bm{x}_q, m)=W_q(\bm{x}_q+\bm{p}_m)$, $f_k(\bm{x}_k, n)=W_k(\bm{x}_k+ \bm{p}_n)$.
而 RoPE 里面,作者使用了一个不同的假设: 假设内积应该仅包含两者的相对信息,也就是
$$ \langle f_q(\bm{x}_q, m), f_q(\bm{x}_k, n)\rangle := g(\bm{x}_q,\bm{x}_k, m-n) $$这里的 $f$ 和 $g$ 都是未知函数。我们的目标就是从这个公式中推导出一个合适的位置编码出来。
不失一般性,我们可以假设
$$ f_q(\bm{x}_m,0) = \bm{x}_q,\quad f_q(\bm{x}_n, 0) = \bm{x}_k $$这个假设代表初始条件下,我们不对输入做任何改变,也就是不增加位置信息。
2D 推导
与 RoPE 一样,我们直接使用复平面来进行推导。
我们假设 $d=2$, 注意到二维平面上的每个点都可以表示为如下形式
$$ \bm{z} = (x,y) = re^{i\theta} $$其中 ($\mathrm{atan2}$ 定义参考 维基百科)
$$ r = \|\bm{z}\|_2 = \sqrt{x^2+y^2}\in\mathbb{R},\quad \theta = \mathrm{atan2}(y, x)\in\mathbb{R}, $$现在,对于三个向量 $f_q(\bm{x}_q, m)$, $f_q(\bm{x}_k, n)$, $g(\bm{x}_q,\bm{x}_k, m-n)$ 我们可以写出其极坐标形式:
$$ \begin{aligned} f_q(\bm{x}_q,m) &:= r_q(\bm{x}_q,m)e^{i\theta_q(\bm{x}_q,m)}\\ f_k(\bm{x}_k, n) &:= r_k(\bm{x}_k, n)e^{i\theta_k(\bm{x}_k, n)}\\ g(\bm{x}_q,\bm{x}_k, m-n) &:= r_g(\bm{x}_q,\bm{x}_k, m-n)e^{i\theta_g(\bm{x}_q,\bm{x}_k, m-n)} \end{aligned} $$我们计算内积并比较同类项得到:
$$ \begin{aligned} r_g(\bm{x}_q,\bm{x}_k, m-n) &:= r_q(\bm{x}_q,m)r_k(\bm{x}_k, n)\\ \theta_g(\bm{x}_q,\bm{x}_k, m-n) &:= \theta_q(\bm{x}_q,m)-\theta_k(\bm{x}_k, n) \end{aligned}\tag{3} $$我们接下来分别推导 $r_g(\bm{x}_q,\bm{x}_k, m-n)$ 和 $\theta_g(\bm{x}_q,\bm{x}_k, m-n)$ 的形式
$r_g(\bm{x}_q,\bm{x}_k, m-n)$
我们令 $m=n=0$ 可以得到初始条件
$$ r_g(\bm{x}_q,\bm{x}_k, 0) = r_q(\bm{x}_q,0)r_k(\bm{x}_k, 0)=\|\bm{q}\|_2\|\bm{k}\|_2 $$我们再令 $n=0$,得到
$$ r_g(\bm{x}_q,\bm{x}_k, m) = r_q(\bm{x}_q,m)r_k(\bm{x}_k, 0)=r_q(\bm{x}_q,m)\|\bm{k}\|_2=\frac{r_g(\bm{x}_q,\bm{x}_k, m-n)}{r_k(\bm{x}_k, n)}\|\bm{k}\|_2 $$这里最后一个等式带入了原始等式 (3),注意到左侧与 $n$ 无关,因此右侧我们选取 $n=1$, 得到
$$ r_g(\bm{x}_q,\bm{x}_k, m) = \frac{r_g(\bm{x}_q,\bm{x}_k, m-1)}{r_k(\bm{x}_k, 1)}\|\bm{k}\|_2 =\cdots= r_g(\bm{x}_q,\bm{x}_k, 0)\left(\frac{\|\bm{k}\|_2 }{r_k(\bm{x}_k, 1)}\right)^{m+1} $$令 $m=0$ 我们有
$$ r_k(\bm{x}_k, 1) = \|\bm{k}\|_2. $$因此我们最终的表达式为:
$$ r_g(\bm{x}_q,\bm{x}_k, m) = r_g(\bm{x}_q,\bm{x}_k, 0) = \|\bm{q}\|_2\|\bm{k}\|_2. $$并且,通过分别设置 $m=0$ 以及 $n=0$ 我们还可以得到
$$ r_q(\bm{x}_q,m) = \|\bm{q}\|_2,\quad r_k(\bm{x}_k, n) = \|\bm{k}\|_2 $$$\theta_g(\bm{x}_q,\bm{x}_k, m-n)$
令 $m=n=0$, 我们得到初始条件
$$ \theta_g(\bm{x}_q,\bm{x}_k, 0) = \theta_q(\bm{x}_q,0)-\theta_k(\bm{x}_k, 0)=\theta_q-\theta_k $$令 $n=1$, 我们有
$$ \begin{aligned} \theta_g(\bm{x}_q,\bm{x}_k, m-1) &= \theta_q(\bm{x}_q,m)-\theta_k(\bm{x}_k, 1)\\ &=\theta_g(\bm{x}_q,\bm{x}_k, m-n) + \theta_k(\bm{x}_k, n)-\theta_k(\bm{x}_k, 1) \end{aligned} $$这里我们带入了公式 (3),注意到公式左边与 $n$ 无关,因此在公式右侧我们令 $n=0$, 得到
$$ \theta_g(\bm{x}_q,\bm{x}_k, m-1) = \theta_g(\bm{x}_q,\bm{x}_k, m)+ \theta_k(\bm{x}_k, 0)-\theta_k(\bm{x}_k, 1) $$分别令 $m=1,2,\dots$ 并相加这些等式,我们得到
$$ \theta_g(\bm{x}_q,\bm{x}_k, 0) = \theta_g(\bm{x}_q,\bm{x}_k, m) + m(\theta_k(\bm{x}_k, 0)-\theta_k(\bm{x}_k, 1)) $$即
$$ \theta_g(\bm{x}_q,\bm{x}_k, m) = m(\theta_k(\bm{x}_k, 1)-\theta_k(\bm{x}_k, 0))+(\theta_q-\theta_k)\tag{4} $$注意到
$$ \theta_g(\bm{x}_q,\bm{x}_k, m) = \theta_q(\bm{x}_q,m)-\theta_k(\bm{x}_k, 0)=\theta_q(\bm{x}_q,m)-\theta_k $$带入上式我们就得到
$$ \theta_q(\bm{x}_q,m) = m(\theta_k(\bm{x}_k, 1)-\theta_k(\bm{x}_k, 0))+\theta_q $$在 (4) 式中再令 $m=m-n$,并带入 $\theta_q(\bm{x}_q,m)$ 就有
$$ \theta_k(\bm{x}_k,n) = n(\theta_k(\bm{x}_k, 1)-\theta_k(\bm{x}_k, 0))+\theta_k $$汇总
最后,我们将以上结果放在一起,就得到
$$ f_q(\bm{x}_q,m) = \bm{q}e^{im\theta}, f_v(\bm{x}_k,m) = \bm{k}e^{in\theta} $$这里 $\theta=\theta_k(\bm{x}_k, 1)-\theta_k(\bm{x}_k, 0)$ 是一个超参数,用于控制频率。
我们记
$$ R_{\theta,m} = \begin{bmatrix} \cos m\theta & -\sin m\theta\\ \sin m\theta & \cos m\theta \end{bmatrix} $$则我们有:
$$ f_q(\bm{x}_q,m) = R_{\theta,m}\bm{q}, f_v(\bm{x}_k,m) = R_{\theta,n}\bm{k}. $$并且
$$ \langle f_q(\bm{x}_q,m), f_v(\bm{x}_k,m)\rangle = \bm{q}^TR_{\theta,m-n}\bm{k} \tag{5} $$多维扩展
上面是 2D 的情况,对于多维情况,苏剑林老师通过将两个元素组对,然后分别进行处理,得到了多维的情形:
$$ R_{\theta,m}^d = \begin{bmatrix} R_{\theta_1,m} & & && & \\ & & R_{\theta_2,m} & & & \\ &&&& \ddots & \\ &&&& & R_{\theta_{d/2},m} \end{bmatrix}\in\mathbb{R}^{d\times d} $$我们可以验证公式 (5) 仍然是成立的。
RoPE 的远程衰减性质
我们接下来看一下结果与相对距离 $m-n$ 之间的关系, 注意到
$$ \langle f_q(\bm{x}_q,m), f_v(\bm{x}_k,m)\rangle = \bm{q}^TR_{\theta,m-n}\bm{k} = \sum_{i=1}^{d/2} \bm{q}_i^TR_{\theta, m-n}\bm{k}_i $$这里 $\bm{q}_i=[q_{2i},q_{2i+1}]^T$, $\bm{k}_i=[k_{2i},k_{2i+1}]^T$ 分别是对应的 pair,我们考虑其中一个分量,不妨假设 $\|\bm{q}\|_2=\|\bm{k}\|_2=1$, 我们有
$$ \begin{aligned} \bm{q}_i^TR_{\theta, m-n}\bm{k}_i &\leq \bm{q}_i^TR_{\theta, m-n}\bm{q}_i\\ &= \bm{q}_i^T\left(\frac{R_{\theta, m-n}+R_{\theta, m-n}^T}{2}\right)\bm{q}_i\\ &\leq \lambda_{\max}\left(\frac{R_{\theta, m-n}+R_{\theta, m-n}^T}{2}\right) \\ &= \cos (m-n)\theta_i \end{aligned} $$其中,第一个不等式是因为 两个向量相等时其内积最大,第二个不等式是由于二次型最大值为矩阵的特征值。
这样我们就有
$$ \langle f_q(\bm{x}_q,m), f_v(\bm{x}_k,m)\rangle \leq \sum_{i=1}^{d/2}\cos (m-n)\theta_i. $$我们可以简单画出对应的曲线:
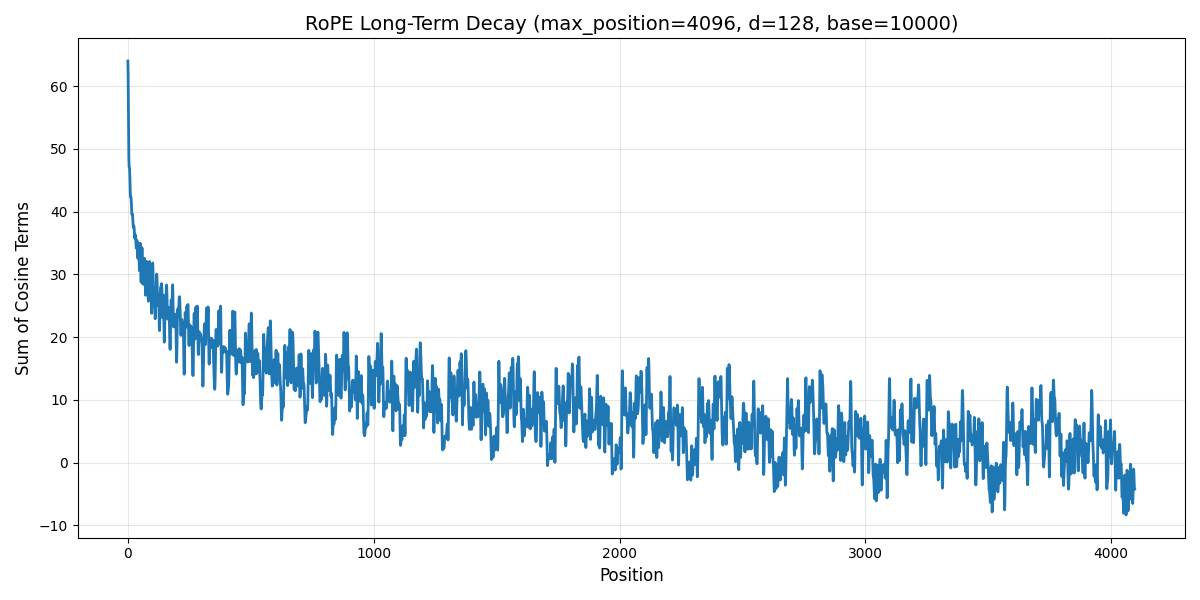
这里针对不同的配置,结果也会略微不同,具体分析可以参加知乎回答 RoPE的远距离衰减
RoPE 代码实现与理解
Naive 实现
我们接下来看一下如何实现 RoPE
$$ \Theta_m\bm{x}=\begin{bmatrix} \cos m\theta_0 & -\sin m\theta_0 & &&\cdots &\cdots &\cdots \\ \sin m\theta_0 & \cos m\theta_0 & &&\cdots &\cdots &\cdots\\ & & \cos m\theta_1 & -\sin m\theta_1 & \cdots &\cdots &\cdots\\ & & \sin m\theta_1 & \cos m\theta_1 & \cdots &\cdots &\cdots \\ &&&& \ddots &\vdots &\vdots\\ &&&& & \cos m\theta_{d/2} & -\sin m\theta_{d/2}\\ &&&& & \sin m\theta_{d/2} & \cos m\theta_{d/2} \end{bmatrix}\begin{bmatrix} x_1\\ x_2\\ \vdots \\ x_d \end{bmatrix} $$在实现的时候,我们一般根据 $\sin$ 和 $\cos$ 进行分组,也就是
$$ \Theta_m\bm{x}=\begin{bmatrix} \cos m\theta_0\\ \cos m\theta_0\\ \vdots\\ \cos m\theta_{d/2}\\ \cos m\theta_{d/2}\\ \end{bmatrix}\odot \begin{bmatrix} x1\\ x2\\ \vdots\\ x_{d-1}\\ x_d\\ \end{bmatrix} + \begin{bmatrix} \sin m\theta_0\\ \sin m\theta_0\\ \vdots\\ \sin m\theta_{d/2}\\ \sin m\theta_{d/2}\\ \end{bmatrix}\odot \begin{bmatrix} -\ x_2\\ x_1\\ \vdots\\ -x_d\\ x_{d-1}\\ \end{bmatrix} $$我们通常按照奇偶 index 来分别计算,然后通过重排序来得到最终的结果,实现代码如下:
| |
LLaMA 实现
| |
在 LLaMA 中,我们首先还是计算 $\theta_i$, 然后在计算的过程中,我们将 $(x_i,x_{i+1})$ 视作一个复数,然后 乘以 $\exp(im\theta)$, 最后再取实部得到最终的结果
通用实现
实际上,naive 版本的实现与现在大语言模型所采用的实现并不一致,我们先看一下现有的大语言模型的 RoPE 实现,这里我们将 LLaMA的transformer代码 放在下面,
| |
我们将上述代码翻译成公式,现在我们的 $\Theta$ 变成了 (对应 emb = torch.cat((freqs, freqs), dim=-1))
实际上 $\sin$ 部分对应的向量现在变成了
$$ [-x_{d/2+1}, -x_{d/2+2}, \dots, -x_{d}, x_1, \dots, x_{d/2}]^T $$我们带回到原始公式,可以得到对应的 RoPE 操作变成了
$$ R_{\theta,m}^d=\begin{bmatrix} \cos m\theta_0 & & & -\sin m\theta_0 & \cdots &\cdots &\cdots \\ & & \cos m\theta_1 & &-\sin m\theta_1 & \cdots &\cdots \\ & & & \cos m\theta_2 & &-\sin m\theta_2 & \cdots \\ \vdots&\vdots&\vdots&\vdots& \vdots &\vdots &\vdots\\ & & & &\cos m\theta_{d/2 - 1} & & -\sin m\theta_{d/2 - 1} \\ \sin m\theta_0 && & \cos m\theta_0 &&\cdots &\cdots \\ & & \sin m\theta_1 & &\cos m\theta_1 & \cdots &\cdots \\ & & & \sin m\theta_2 & &\cos m\theta_2 & \cdots \\ \vdots&\vdots&\vdots&\vdots& \vdots &\vdots &\vdots\\ &&&& \sin m\theta_{d/2 - 1}& & \cos m\theta_{d/2 - 1} \end{bmatrix} $$这列每一行的 $\cos$ 和 $\sin$ 都相差了 $d/2$ 列.
因此,这里的区别在于,原始 RoPE 计算的 pair 为 $(x_{i}, x_{i+1})$, 而 LLaMA 里的 RoPE 计算的 pair 为 $(x_{i}, x_{i+d/2})$. transformers library 使用这种方式,可以减少计算量,提高整体的计算效率。
为了适应使用 LLaMA 中实现的 RoPE 的,Huggingface 对权重进行了转换,使得基于原始 RoPE 实现的模型也可以获得加速.
假设 $d=8$,原始 RoPE 的 pair 为 [(q_0, q_1), (q_2, q_3), (q_4, q_5), (q_6, q_7)], 新的 pair 为 [(q_0, q_4), (q_1, q_5), (q_2, q_6), (q_3, q_7)]. 我们希望对 index 进行 remap,我们发现一个满足条件的 permutation 为 [0, 2, 4, 6, 1, 3, 5, 7], 也就是 q_0->q_0, q_2->q_1, …, q_7->q_7.
但是,如果我们在推理时这样做,就会降低整体速度,因此 Huggingface 的做法是改变 $W_Q$ 和 $W_K$ 的权重,具体来说,就是 $\Pi q=(\Pi W_Q)x$, 左边是在线转换,右侧离线转换。转换好 $W_Q$ 之后,正常计算就可以了。具体代码 为
| |
结论
本文中,我们回顾了位置编码,包括绝对位置编码和相对位置编码,我们着重介绍了 RoPE 的原理,推导以及代码实现。