字节Seed在5月11号发布了Seed1.5-VL技术报告。技术报告详细介绍了Seed1.5-VL的架构,训练和评估细节
简介
Seed1.5-VL是多模态大模型,它是一个标准的 Vision Encoder - MLP - LLM 的架构,Vision Encoder是自研的Seed-ViT,参数量为532M,大语言模型的激活参数为20B(虽然论文未提及总参数量,但是从seed-Thinking v1.5来看,总参数量应该是200B)。Seed1.5-VL强调了agent能力,比如GUI control和gameplay。
介绍
现有的LVLM还不能与人类的通用能力相比,特别是在3D空间理解,物体技术,交互游戏等方面。并且,LVLM训练预料的多样性也不如LLM。最后,多模态数据的异质性也对模型的训练和推理提出了挑战。
基于这些问题,作者提出了Seed1.5-VL,一个视觉多模态大模型。通过构建高质量的训练数据,作者大幅度提高了模型的表现。作者还进一步探究了模型的scaling law以及pre-training和post training算法的设计。为了提高训练和推理效率,作者在infra上也进行了改进
架构
Seed1.5-VL的架构如下图所示
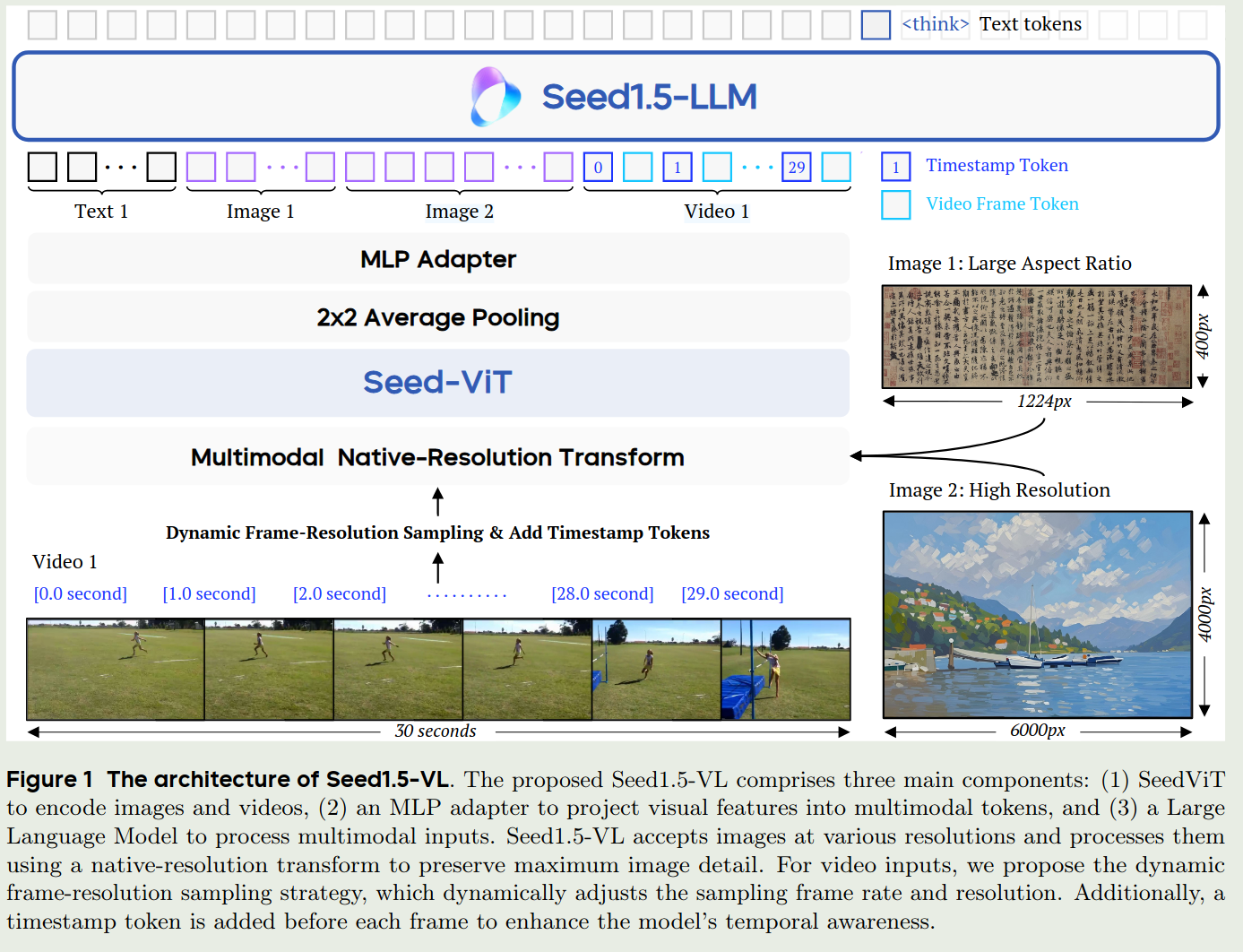
Seed1.5-VL的架构包含三个部分:
- Vision Encoder: vision encoder是seed自研的Seed-ViT,拥有532M参数
- Adapter:一个两层的MLP
- LLM:Seed1.5-LLM,一个MoE架构的LLM
Seed1.5-VL支持文本,图片和视频输入,输入为文本。其可以进行理解和推理(reasoning)。
Seed-ViT
Seed-ViT主要是在两个方面进行了改进:
- 在pre-training阶段使用了视频数据,来提高模型的时空间感知能力
- 使用了2D-RoPE来处理动态分辨率的图片
Seed-ViT的超参数如下表所示
| Patch size | Pos Embedding | Head dim | #heads | Embedding dim | MLP ratio | #layers |
|---|---|---|---|---|---|---|
| 14 | 2D RoPE | 64 | 20 | 1280 | 4.0 | 27 |
对于输入的图片,Seed-ViT首先将图片resize到28*28的倍数,接下来图片会被分割为14*14的patch. 与NaViT一样,Seed-ViT也是用了token-packing的操作,来将多个图片packing到一个sequence里进行训练。最后,对于Seed-ViT输出的图片特征,作者还是用了 $2\times 2$的 average pooling来降低token个数。
Seed-ViT的预训练包括三个阶段,其设置和超参数如下表所示:
| Categories | Unlabeled Image | Image-text pairs | Video-audio-text tuples |
|---|---|---|---|
| Training samples | 2.2B | 4.8B | 65M |
| Token percentages | 4.0% | 91.2% | 4.8% |
| Batch sizes | 55,296 | 32,768 | 1,024 |
| LR warm up steps | 1,692 | 2,000 | 12,800 |
| Maximum LR | $7.06\times 10^{-3}$ | $1.0\times 10^{-4}$ | $5.0\times 10^{-5}$ |
| Minimum LR | $1.05\times 10^{-5}$ | $1.2\times 10^{-6}$ | $2.02\times 10^{-7}$ |
在预训练时,作者考虑了三点:
- 训练效率:尽可能提高模型的训练效率
- 原生图片精度输入处理:让模型可以尽早处理不同分辨率图片输入
- 数据利用率:可以使用不同类型的数据
基于这三点考虑,Seed-ViT的训练包括三个阶段:
- Masked Image modeling with 2D RoPE:这一阶段的目的是提高模型对与几何和结构的感知能力。作者使用
EVA02-CLIP-E作为教师模型,然后随机将75%的patches进行mask,最后让Seed-ViT输出的特征尽可能匹配教师模型输出的特征。这里的损失函数是cosine similarity. 作者发现,scale up MIM之后,VLM在OCR和文档理解任务上的表现得到了大幅度的提升。 - Native Resolution Contrastive Learning:这一阶段和CLIP,SigLIP的训练差不多,text encoder与
EVA02-CLIP-E相同。损失函数为SigLIP loss和SuperClass loss - Omni-modal pret-raining:这一阶段使用了MiCo框架,来将video frames, audio, visual captions以及audio captions进行对齐,text encoder编码caption,ViT编码其他部分。通过这一阶段的训练,模型可以学习omni-model representations,并且还可以提高模型的图片和视频理解人物上的表现。
视频编码
对于视频输入,Seed1.5-VL采用了 Dynamic Frame-Resolution Sampling技巧,核心思想在于根据budget和处理的任务来动态调整采样率(frame)和每一帧的图片精度(resolution)。
具体来讲,在时序上,默认的FPS为1,如果要处理有关时序信息任务的话,FPS调整为2,如果要处理motion tracking等任务的话,FPS提高到5.为了进一步提高模型的时间感知能力,Seed 1.5-VL加入了timestamp tokens (e.g., [1.5 second])。
在空间上,每个frame的可选精度为 ${640, 512, 384, 256, 160, 128}$,选择的精度根据我们的budget进行决定。如果说我们使用最低配置还是不能处理视频输入的话,我们就会先进行均匀采样,然后再进行处理,这样可以让模型处理所有的视频信息。
Pre-training
pre-training阶段一共包括了3T token. 作者详细介绍了每一个类别。这里我们就简单总结一下。数据一共包括以下7个类别
- Generic Image-text pairs & knowledge data. 这部分数据主要是图文交错以及image text-pairs数据。作者介绍了一下针对长尾数据(稀有物种识别)的数据构建方式
- OCR. 这部分数据有1B左右的sample,包括documents, scene texts, tables, charts以及flowcharts等。其中,作者通过SynthDog和Latex合成了200M左右的文本密集图片。作者还对合成的数据进行了增广;Chart数据包括公开数据集和合成的数据集,最终一共有100M的样本; Table数据集也是通过提取得到的,一共包含50M左右的图片。作者还基于OCR结果构建了VQA数据集,来提高模型理解图片文字的能力
- Visual Grounding & Counting: 提高模型识别和定位物体的能力。数据格式包括bounding box和center points. 其中bounding box主要是公开数据集;作者还是用Grounding DINO来标记了一部分数据,最后一共收集了200M的样本; point数据主要是PixMo, 作者还使用了Molmo以及CountGD标注了一部分数据,最后一共包括170M的指令以及110B的token; Counting数据从bounding box 和point数据集中筛选得到,包括了8M的样本和13B的token。最后在训练时,与InternVL一样,坐标会被normalize到
[1,1000] - 3D spatial understanding. 主要包括相对深度,绝对深度和3D Grounding数据;对于相对深度,作者使用DepthAnything V2来标注,得到了3.2B的token; 对于绝对深度,作者使用了公开数据集,最终包含18M的指令以及28B的token;对于3D Grounding,作者使用了公开数据集,最终包含770的指令以及1.3B的token
- Video. 主要包含general video understanding数据, video temporal grounding and moment retrieval以及video streaming data.
- STEM. 主要包含image comprehension data和problem-solving data. 前者包括收集的3.2M教育相关的数据,以及10M结构化表格,4.5M化学结构表达式,1.5M坐标系数据。后者包括100M K12的习题
- GUI. 作者使用UI-TARS来合成数据。数据主要包括perception, grounding 以及 reasoning
预训练包括三个stage,其实验设置如下表所示:
| Stages | Stage 0 | Stage 1 | Stage 2 |
|---|---|---|---|
| Training budget (tokens) | 16B | 3T | 240B |
| Sequence length | 32,768 | 32,768 | 131,072 |
| Trainable components | MLP adaptor | all | all |
| Batch sizes (tokens) | 8.4M | 71M | 71M |
| LR warmup steps | 100 | 500 | 0 |
| Maximum LR | $2.52 \times 10^{-4}$ | $5.22 \times 10^{-5}$ | $5.22 \times 10^{-6}$ |
| Minimum LR | $4.50 \times 10^{-5}$ | $5.22 \times 10^{-6}$ | $5.22 \times 10^{-6}$ |
- Stage 0: 仅训练MLP,用于对齐vision encoder和LLM,使用了16B token
- Stage 1:训练全部参数,用于获取知识以及掌握grounding和OCR能力,使用了3T token
- Stage 2:训练全部参数,提升模型的长上下文能力以及对下游任务的适应性,包括视频理解,coding和3D空间理解,上下文长度从32,768提升到131,072
作者还进行了消融实验,采取了和Qwen2-VL一样的训练方式,结果发现,本文的训练方式效果更好。作者认为,解冻vision encoder,可能让vision encoder弥补LLM的不足,进而损害其自身的感知能力。
作者还探究了模型的scaling law,使用的建模函数为:
$$ \log(\hat{L}) \sim \log(B) - \beta \log(D) = -a \log(D) + b $$这里 $L$ 是NLL loss, D是训练的token数,$a$和$b$是待拟合的参数。实验结果如下图所示。
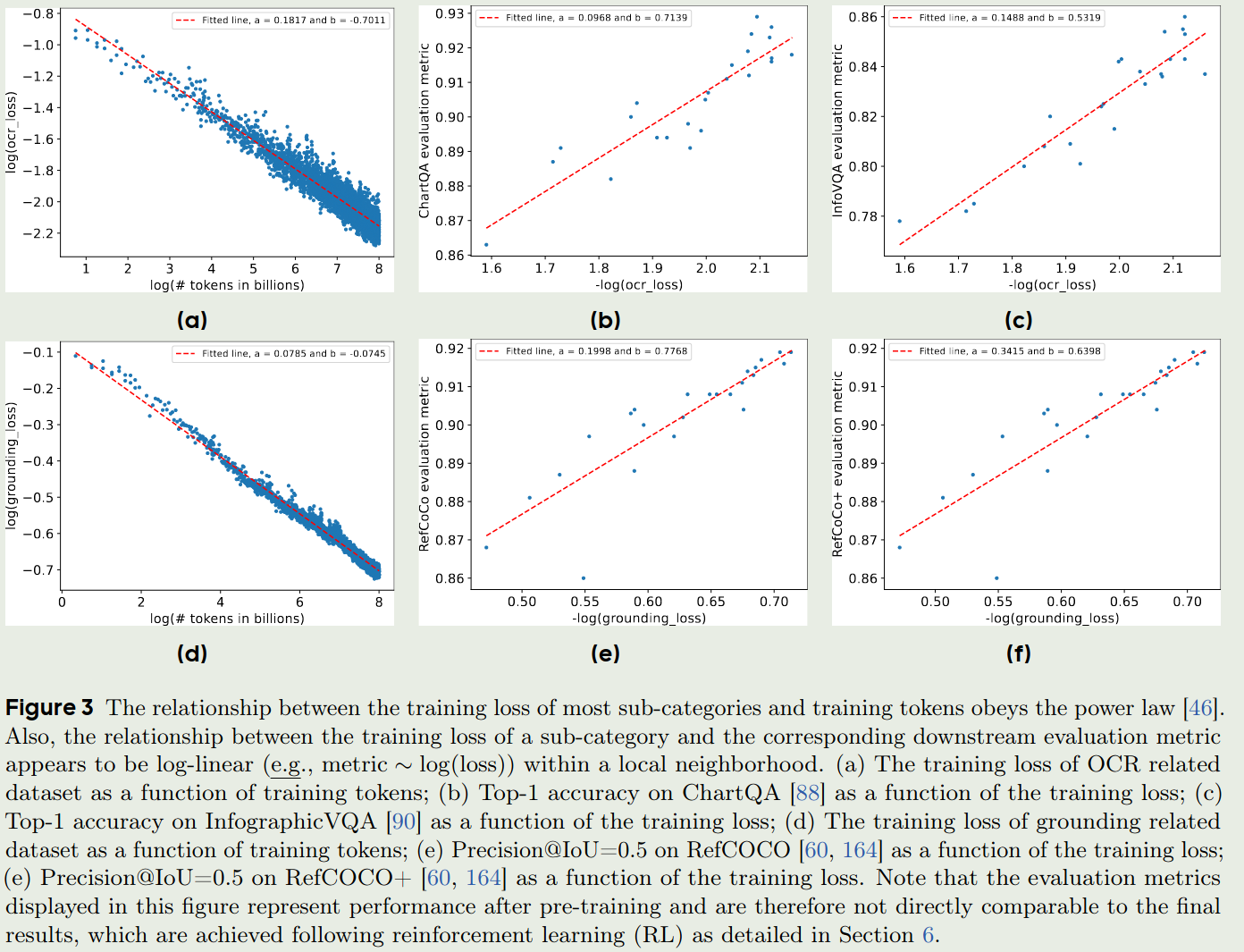
结论是在特定领域数据训练的loss可以作为模型在下游任务上表现的一个估计
Post-training
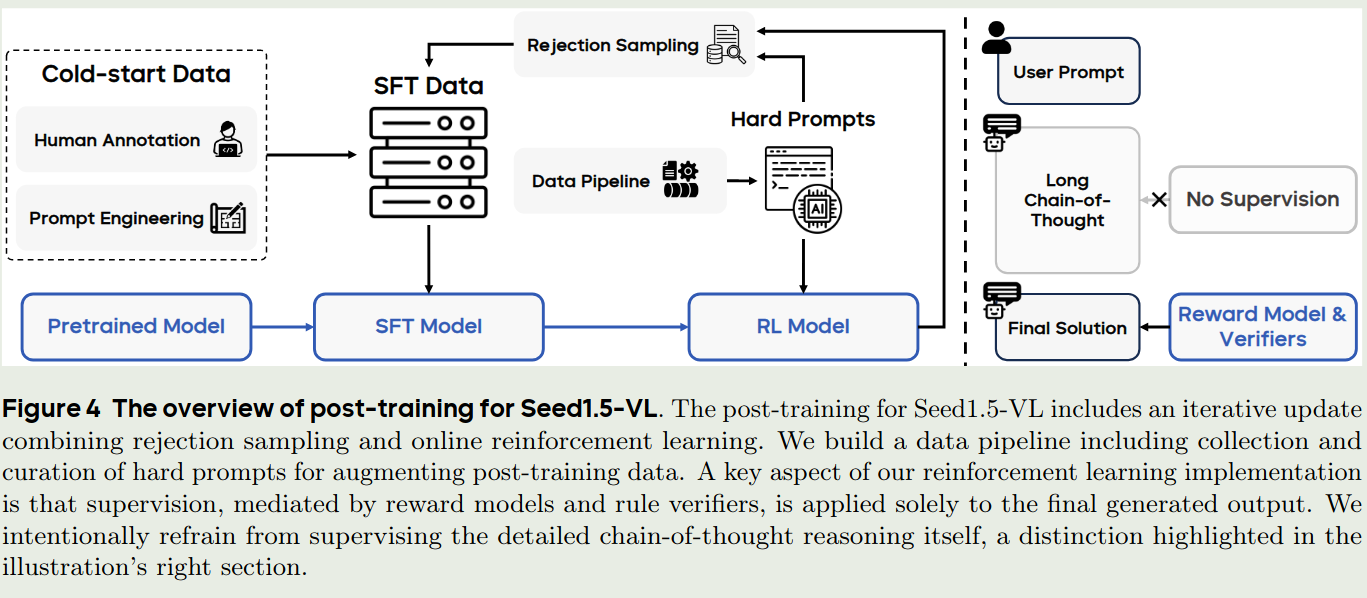
post-training分为两个阶段:SFT和RL,其中RL包括RLHF, RLVR. 总流程如下图所示
SFT
SFT数据主要包括General Instruction data以及Long Chain-of-Thought (LongCoT) data,劝着途胜模拟徐保国的指令跟随能力,后者提升模型的reasoning能力。
通用指令微调数据包括13,000条收集的数据和40,0000高质量的公开数据集。
RLHF
RLHF的数据包括人类标注数据和合成数据。对于reward model,作者使用了LVLM作为reward model,来给不同的response进行打分。最后,使用变体的PPO算法进行训练。
RLVR
RLVR的训练数据主要包含Visual STEM和Visual Perception and Reasoning. 前者包含1M左右的问题,主要是STEM和K12的相关问题。后者包括grounding, visual instruction following以及visual puzzles & games等
Hybrid RL
RL的训练过程包含了RLHF和RLVR两个RL算法。作者介绍了以下细节:
- format reward. 要求模型输出格式为
<think>{thought}</think>{solution} - hybrid reward. reward包括RM和verifier两部分
- Shared critic. 使用一个critic model来估计value function
- KL coefficients. 对于RLHF和RLVE,使用不同的KL divergence稀疏
Iterative Update by Rejection Sampling Fine-tuning
在训练的过程中,作者使用了一个迭代训练策略。一个开始模型在低质量的Long-CoT数据上进行SFT,在RL过后,作者会重新评估问题的难度,然后过程掉一部分数据,再进行SFT,这样反复进行迭代训练以提高模型的表现。
Infra部分好像都是一些细节,这里就跳过了。
Evaluation
作者评估了
- Seed-ViT的表现
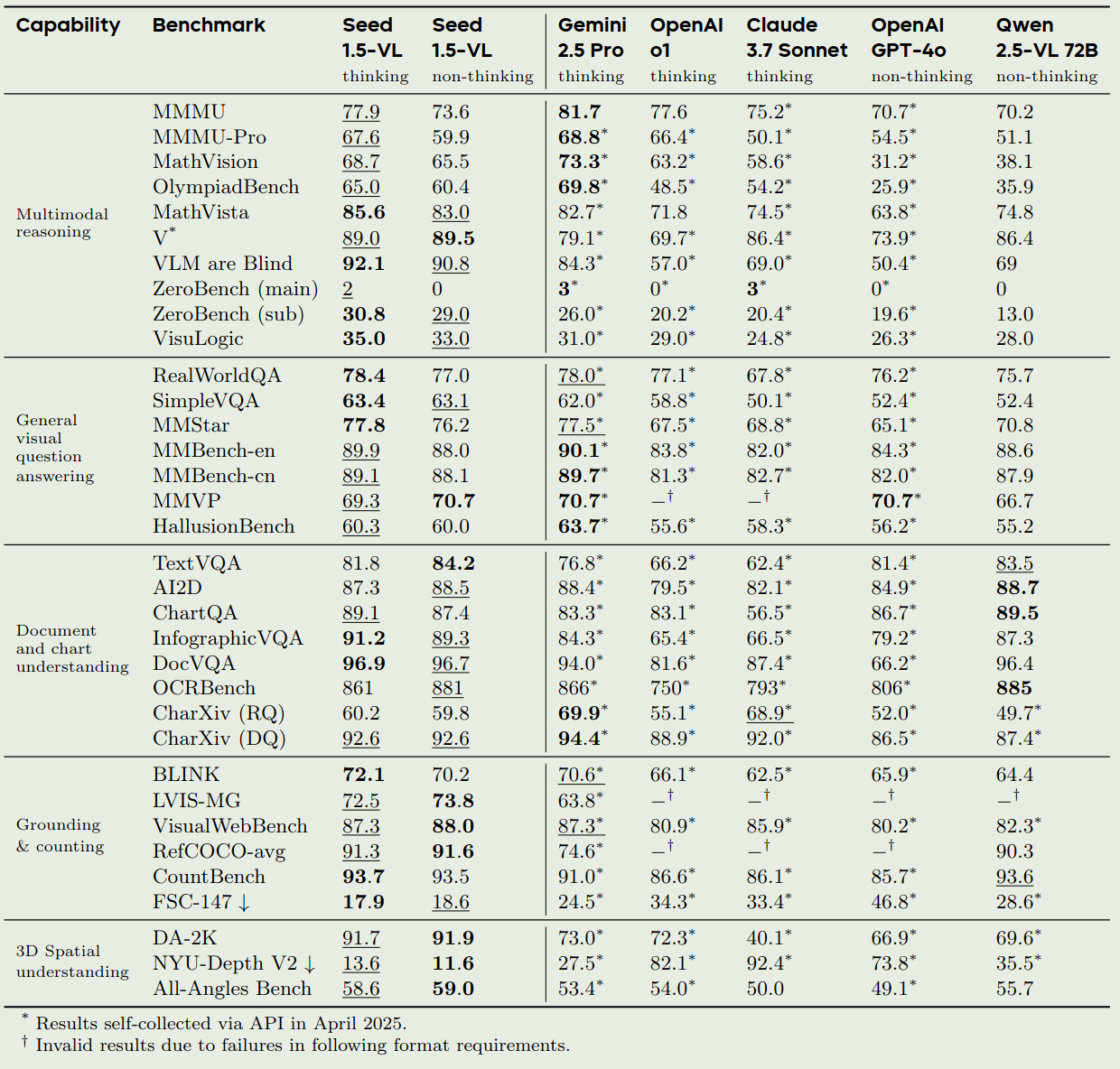
- Seed1.5-VL的通用视觉理解和推理能力
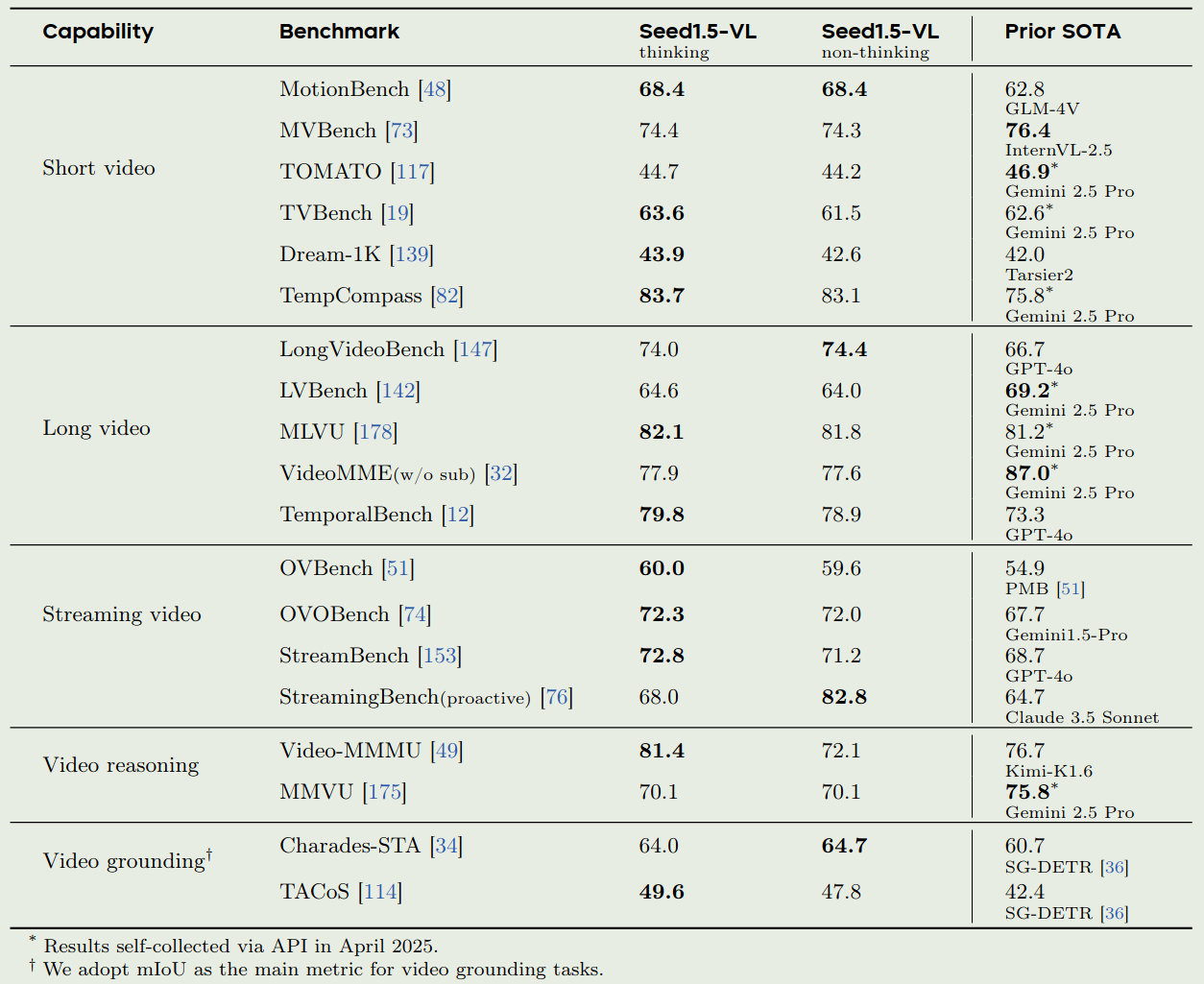
- Seed1.5-VL的视频相关能力
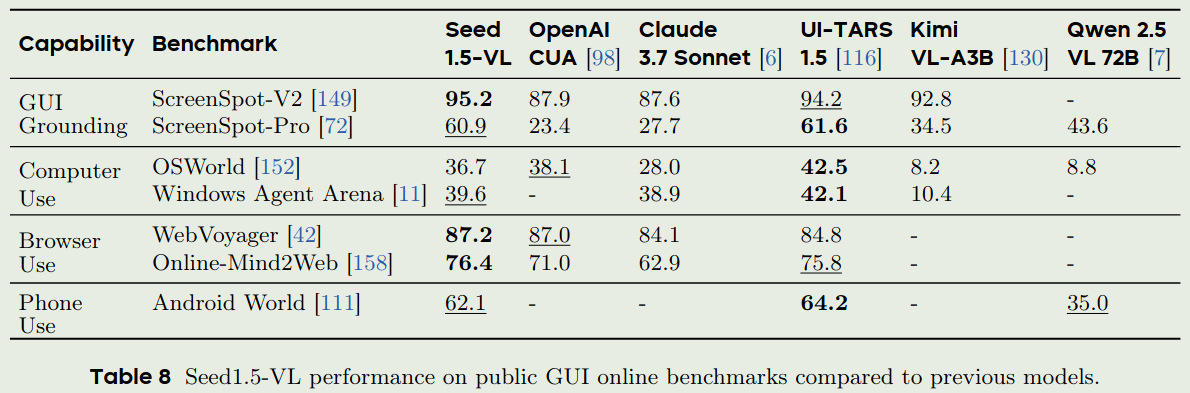
- Seed1.5-VL的agent能力
- Seed1.5-VL在内部benchmark上的表现
由于Seed1.5-VL是一个API模型,并且其内部benchmark不公开,因此Seed-ViT以及其在内部benchmark上的表现我们就不列出来了。我们主要看一下其和领先多模态大模型的对比
Conclusion
在本文中,作者介绍了Seed1.5-VL,一个领先的多模态大模型,可以处理图片和视频输入。作者介绍了Seed-ViT以及Seed1.5-VL的数据,训练和评估。
作者还分析了以下Seed1.5-VL的不足以及未来的改进方向
- Seed1.5-VL在复杂视觉感知任务中,其计数能力会下降。
- Seed1.5-VL的高阶推理能力还尚有不足,作者拿Klotski举了一个例子
- Seed1.5-VL的3D spatial reasoning能力不足
- Seed1.5-VL的temporal reasoning能力不足
- Seed1.5-VL与其他模型一样,存在幻觉问题
未来,有以下值得探索的方向:
- 涌现现象(emergent abilities)
- scaling law,进一步探索模型参数量,算力以及数据对模型表现的影响
- 提高模型的3D spatial reasoning能力,降低模型的幻觉,提高模型分组合搜索能力