Introduction
RL 的基本思想是通过与环境进行交互,获取奖励来进行学习
RL 的定义如下
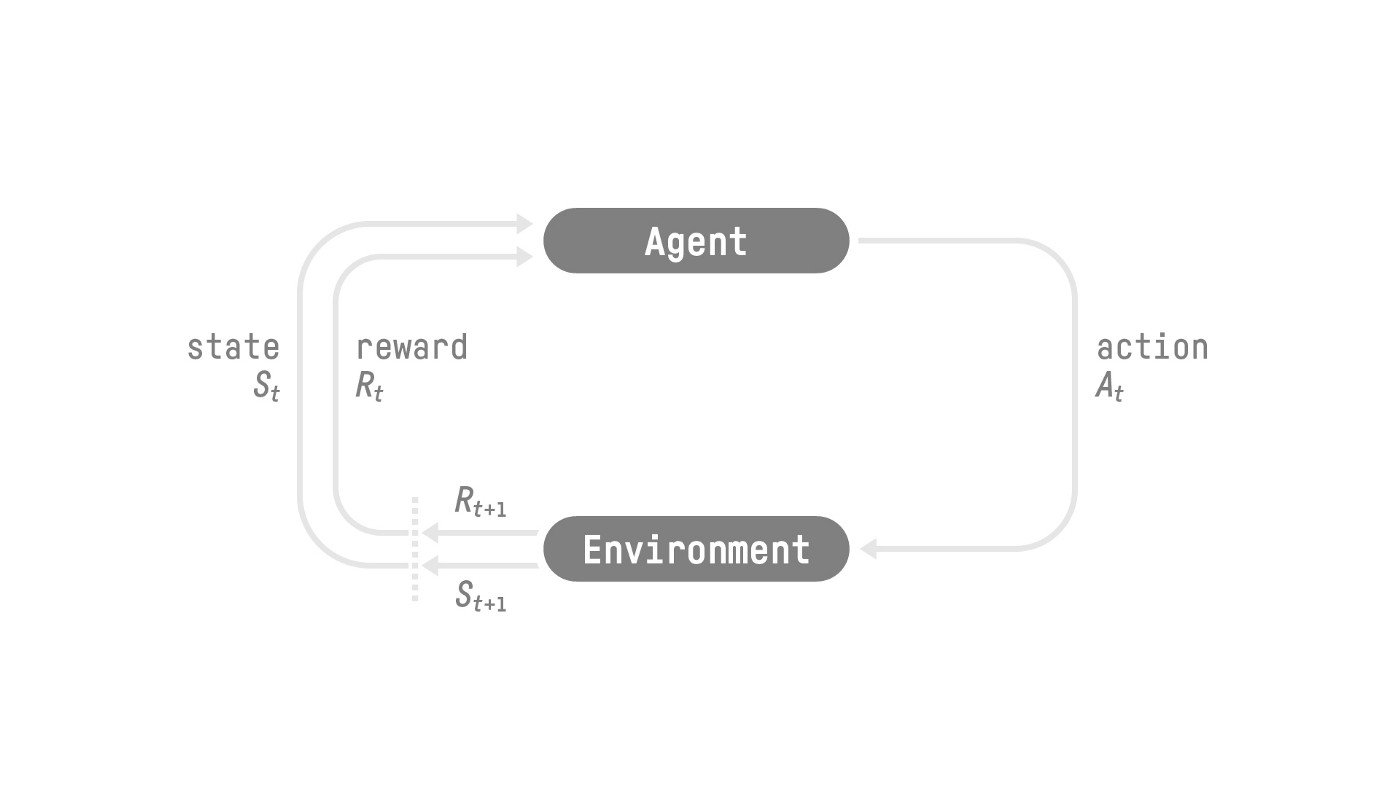
强化学习是一个通过构建可以与环境进行交互的 agent 来解决控制和决策任务的学习框架,交互的方式为 agent 执行 action, 然后环境给予奖励
RL 的执行过程如下所示
RL Basics
RL 的数学建模依赖于 Markov decision process, 下面我们先介绍相关概念
Definition
一个 Markov decision process (MDP) 包含如下模块:
- 时间 $t=0,1,\dots,T$.
- 状态 $s_t\in\mathcal{S}\cup\{\langle term\rangle\}$, 其中 $\mathcal{S}$ 是状态空间 (state space)
- 动作 $a_t\in\mathcal{A}$ , 其中 $\mathcal{A}$ 是动作空间 (action space)
- 奖励 $r_t\in\mathbb{R}$, 环境对 agent 当前 action $a_t$ 给予的反馈
- 终止时间 $T$, 额外定义 $s_T=\langle term\rangle$ 为终止状态
- 初始状态分布 $s_o\sim p_0$.
- 转换概率 (transition probability): $r_t,s_{t+1}\sim p(\cdot,\cdot\mid s_t,a_t)$.
- 轨迹 $\tau=(s_0,a_0,r_0,s_1,a_1,r_1,\dots,s_{T-1},a_{T-1}, r_{T-1}, s_T)$.
- Markov property. $t+1$ 时刻的状态仅与 $t$ 时刻的状态与动作相关,即 $p(s_{t+1}\mid s_t,a_t,\dots,a_0,a_0)=p(s_{t+1}\mid s_t,a_t)$ 以及 $p(r_{t}\mid s_t,a_t,\dots,s_0,a_t)=p(r_t\mid s_t,a_t)$.
我们会对一些表达式进行简化:
- 当 $r_t$ 完全由 $(s_t,a_t)$ 决定时,我们记为 $r_t=r(s_t,a_t)$
- 我们假设状态转移函数是平稳的 (stationary), 即 $p_t(r,s'\mid s,a)=p(r,s'\mid s,a)$。
- $a_t$ 通常由一个策略 $\pi$ 决定, 当 $\pi$ 完全由 $s_t$ 决定时,我们记为 $a_t=\pi(s_t)$, 反之,$a_t$ 从 $\pi$ 中采样得到,即 $a_t\sim\pi(\cdot\mid s_t)$.
- 一般我们会使用一个神经网络来表示 $\pi$, 即 $\pi=\pi_\theta$, 这里 $\theta$ 就是神经网络的参数。
state and observation
通常来说,state 包含了当前进行决策所需要的所有信息(环境信息,历史信息,agent 自身信息),这种情况下 MDP 的 Markov 性质成立。实际上 agent 获取的可能只是一部分信息,即 agent 获取的为 observation, 这种情况下 MDP 特化为 Partially Observable Markov Decision Process (POMDP), 此时我们的 Markov 性质就不再对 observation 成立,我们的问题也变的更加困难。
Takeaway State 表示整个环境的完整表示,而 observation 则是环境的部分表示
对于 LLM 来说,我们可以获取历史状态的所有信息,因此我们可以将 RL for LLM 视作一个 MDP 问题。
action space
action space $\mathcal{A}$ 可以是连续的,比如上下左右四个方向,也可以是连续的,比如方向盘的角度
episodic and continuing
根据任务的终止时间 $T$,我们可以将任务分为 episodic task 和 continuing task, 当 $T=\infty$ 时, 我们的任务称为 continual task,比如游戏, 否则称之为 episodic task, 比如股票预测.
除了 POMDP 之外,MDP 也有一些其他的推广形式:
- non-stationary dynamics, 即不同时间步的状态转移函数不同
- pre-determined terminal time $T$. 终止时间指定,因为 $p_{T-1}(\langle term\rangle\mid s_{T-1}, a_{T-1})=1$ 且 $p_{t+1}(\langle term\rangle\mid s_{t}, a_{t})=0$, $\forall t\in[T-2]$, 所以此时 MDP 为 non-stationary,
- policy $\pi_t$ may be time-dependent, 一般来说仅在 non-stationary dynamics 中有必要
- actions may depend on states, 即 $a_t\in\mathcal{A}(s_t)$.
由于 $T$ 也是一个随机变量,因此 $\mathbb{E}[\sum_{t=0}^T\cdot]\neq\sum_{t=0}^T\mathbb{E}[\cdot]$.
为了简化,我们一般会使用一个等价的,不会停止的 MDP:
- the MDP never stops, 即 $T=\infty$
- $s_t\in\mathcal{S}\cup\{\langle term\rangle\}$, 这里 $\langle term\rangle$ 是一个 normal state.
- absorbing state: 当 $s_t=\langle term\rangle$ 时, $r_t=0, s_{t+1}=\langle term\rangle$, 即状态不会离开 $\langle term\rangle$.
- $\pi(\cdot\mid\langle term\rangle)$ 不产生任何影响
RL Objective
RL 的最终目标为最大化累计奖励,称为 expected return, 这个目标基于reward hypothesis, 即所有的目标都可以被描述为最大化 expected return. 目标函数表达式如下
$$ \max_{\pi}\quad \mathbb{E}_{s_0\sim p_0}^\pi\left[\sum_{t=0}^{T-1}r_t\right] $$由于未来存在不确定性,我们会对这种不确定性施加惩罚,即时间越远,其对于当前的 reward 就越低,这其实就是经济学中的现值 (present value, PV), 因此我们实际上优化的目标函数是 expected discounted return:
$$ \max_{\pi}\quad \mathbb{E}_{s_0\sim p_0}^\pi\left[\sum_{t=0}^{T-1}\gamma^tr_t\right] $$这里 $\gamma\in(0, 1]$ 是一个超参数,我们定义
$$ G_t = r_t +\gamma r_{t+1}+\cdots+\gamma^{T-1-t}r_{T-1}=\sum_{t'=t}^{T-1}\gamma^{t'-t}r_{t'} $$$G_t$ 被称为 discounted return.