这一节我们讨论如何评估 (evaluate) 一个 policy. 要评估一个 policy $\pi$, 我们需要求出对应的 value function $V^\pi$.
Value Function
Monte Carlo
注意到
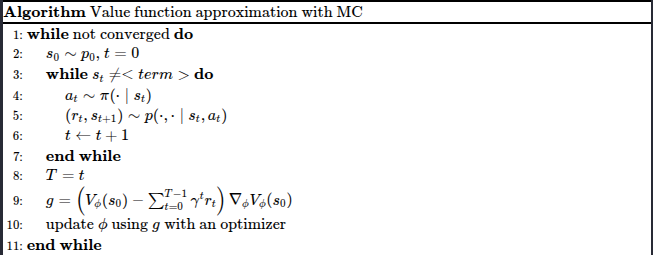
$$ V^\pi(s) = \mathbb{E}^\pi\left[\sum_{t=0}^{T-1}\gamma^tr_t\mid s_0=s\right] $$我们可以利用 Monte Carlo (MC) 方法来进行估计,即从 $s_0=s$ 出发,独立随机采样 $N$ 条轨迹
$$ \{s, a_0^{(i)},r_0^{(i)},\dots,a_{T^{(i)}-1}^{(i)},r_{T^{(i)}-1}^{(i)}, s^{(i)}_{T^{(i)}}\}, i=1,\dots,N $$然后我们使用样本平均来近似期望
$$ V^\pi(s) = \mathbb{E}^\pi\left[\sum_{t=0}^{T-1}\gamma^tr_t\mid s_0=s\right]\approx \frac{1}{N}\sum_{i=1}^N\sum_{t=0}^{T^{(i)}-1}\gamma^tr_t^{(i)} $$如果 $\mathcal{S}$ 比较小,我们可以遍历 $s\in\mathcal{S}$ 来估计 $V^\pi$.
当 $\mathcal{S}$ 非常大或者连续时,我们需要使用神经网络 $V_\phi$ 来近似 $V^\pi$,
$$ \min_{\phi} \mathcal{L}(\phi) =\mathbb{E}_{s\sim p_0}\left[\frac12\left(V_\phi(s)-V^\pi(s)\right)^2\right] $$对上面的目标函数求导得到
$$ \begin{align} \nabla_\phi \mathcal{L}(\phi) &= \mathbb{E}_{s\sim p_0}\left[\left(V_\phi(s)-V^\pi(s)\right)\nabla_\phi V_\phi(s)\right]\\ &= \mathbb{E}_{s\sim p_0}\left[\left(V_\phi(s)- \mathbb{E}^\pi\left[\sum_{t=0}^{T-1}\gamma^tr_t\mid s_0=s\right]\right)\nabla_\phi V_\phi(s)\right]\\ &=\mathbb{E}_{s\sim p_0}\left[\mathbb{E}^\pi\left[\left(V_\phi(s)- \sum_{t=0}^{T-1}\gamma^tr_t\right)\nabla_\phi V_\phi(s)\mid s_0=s\right]\right]\\ &= \mathbb{E}_{s\sim p_0}^\pi\left[\left(V_\phi(s)- \sum_{t=0}^{T-1}\gamma^tr_t\right)\nabla_\phi V_\phi(s)\mid s_0=s\right]\\ \end{align} $$这样,我们可以结合 SGD 与 MC 来近似 $V^\pi$
Temporal Difference
Temporal difference (TD) learning 通过相邻两步的转换关系来近似函数。注意到,
$$ V^\pi(s) =\mathbb{E}^\pi[r_0 + \gamma V^\pi(s_1)\mid s_0=s] $$与前面的方法类似,我们先采样然后使用 MC 来进行估计
$$ V^\pi(s) =\mathbb{E}^\pi[r_0 + \gamma V^\pi(s_1)\mid s_0=s]\approx \frac{1}N\sum_{i=1}^N\left(r_0^{(i)} + \gamma V^\pi(s_1^{(i)})\right) $$同样的,当 $\mathcal{S}$ 比较大或者连续时,我们构造损失函数
$$ \min_{\phi} \mathcal{L}(\phi) =\mathbb{E}_{s\sim p_0}\left[\frac12\left(V_\phi(s)-V^\pi(s)\right)^2\right] $$对应的梯度为
$$ \nabla_\phi \mathcal{L}(\phi) =\mathbb{E}_{s\sim p_0}^\pi\left[\left(V_\phi(s)- r_0-\gamma V^\pi(s_1)\right)\nabla_\phi V_\phi(s)\mid s_0=s\right] $$但是,这里存在的问题在于,我们使用了 $V^\pi(s_1)$, 而这个值是未知的,因此,一个做法是使用当前的 value function $V_\phi$ 来进行代替,即
$$ \nabla_\phi \mathcal{L}(\phi) \approx \mathbb{E}_{s\sim p_0}^\pi\left[\left(V_\phi(s)- r_0-\gamma V_\phi(s_1)\right)\nabla_\phi V_\phi(s)\mid s_0=s\right] $$这样,我们结合 TD 和 GSD 的算法就变成了
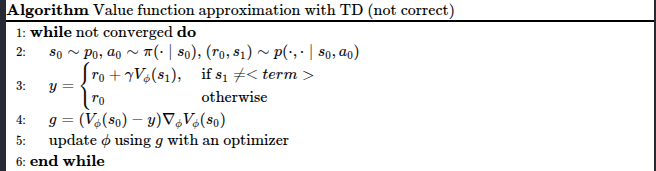
接下来,我们需要关注如何计算 $g$, 直接通过 $g=\left(V_\phi(s)- r_0-\gamma V_\phi(s_1)\right)\nabla_\phi V_\phi(s)$ 来进行计算,这在数学上是没有问题的,但是从自动微分的角度不对,比如 Pytorch 对应的实现应该是
| |
可以看到,我们实际上求的梯度是
$$ \nabla_\phi\left[\frac12\left(V_\phi(s)-(r+\gamma V_\phi(s'))\right)^2\right]=(V_\phi(s)-(r+\gamma V_\phi(s'))(\nabla_\phi V_\phi(s)-\nabla_\phi V_\phi(s')) $$这显然与 $g$ 不相等。
为了解决这个问题,我们需要使用 stop-gradient 的技巧来避免 $V_\phi(s')$ 参与反向传播,这个时候,我们的目标函数就变成了
$$ \frac12\left(V_\phi(s)-(r+\gamma\ \mathrm{sg}[V_\phi(s')])\right)^2 $$其中 $\mathrm{sg}[\cdot]$ 是 stop-gradient operator, 满足
$$ \mathrm{sg}[x] = \begin{cases} x &\text{forward pass}\\ 0 &\text{backward pass} \end{cases} $$这样其梯度就是
$$ \nabla_\phi\left[\frac12\left(V_\phi(s)-(r+\gamma\ \mathrm{sg}[V_\phi(s')])\right)^2\right]=(V_\phi(s)-(r+\gamma V_\phi(s'))\nabla_\phi V_\phi(s)=g $$对应的 python 代码为
| |
最终,我们的算法实现为
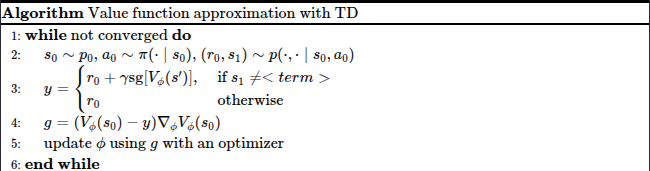
上述这种做法其实是 semi-gradient methods, 这类方法在参数更新时,只计算部分梯度的方法。虽然这种方法牺牲了严格的梯度下降性质,但是其能够保证更好的表现。
K-step TD
我们可以进一步推广 TD 到多步的场景,注意到
$$ \begin{align} V^\pi(s) &=\mathbb{E}^\pi[r_0 + \gamma V^\pi(s_1)\mid s_0=s]\\ &=\mathbb{E}^\pi[r_0 + \gamma \mathbb{E}^\pi[r_1 + \gamma V^\pi(s_1)\mid s_1]\mid s_0=s]\\ &= \mathbb{E}^\pi[\mathbb{E}^\pi[r_0 + \gamma r_1 + \gamma^2 V^\pi(s_2) \mid s_1] \mid s_0=s] \end{align} $$由重期望定理(Law of Total Expectation):
$$ \mathbb{E}^\pi[\mathbb{E}^\pi[X \mid s_1] \mid s_0=s] = \mathbb{E}^\pi[X \mid s_0=s] $$因此:
$$ V^\pi(s) = \mathbb{E}^\pi[r_0 + \gamma r_1 + \gamma^2 V^\pi(s_2) \mid s_0=s] $$重复这个过程 k 次,得到 k 步展开:
$$ \begin{align} V^\pi(s) &= \mathbb{E}^\pi\left[\sum_{i=0}^{k-1} \gamma^i r_i + \gamma^k V^\pi(s_k) \mid s_0=s\right] \end{align} $$现在,我们可以基于 k-step transition 构建目标函数
$$ \min_{\phi} \mathcal{L}(\phi) =\mathbb{E}_{s\sim p_0}\left[\frac12\left(V_\phi(s)-\left(\sum_{i=0}^{k-1} \gamma^i r_i + \gamma^k V^\pi(s_k)\right)\right)^2\right] $$使用前面分析的方法,我们就可以写出类似的算法
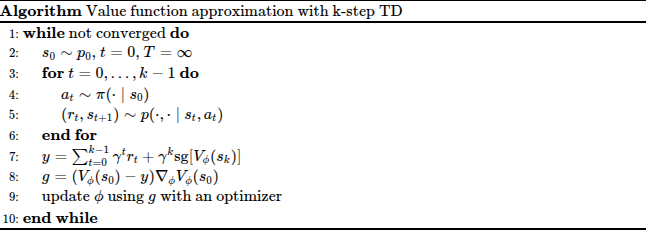
一般来说,我们会令 $k=5$.
MC v.s. TD
TD 本质上一种 bootstrapping, 当需要使用 $V^\pi$ 时,我们使用 $V_\phi$ 来代替。两者对比如下
- MC 需要完整的一次采样,但是 TD 可以通过 bootstrap 提高采样效率。
- 当 $V_\phi$ 与 $V^\pi$ 差距较大时,boostraping 会导致训练不稳定,而 MC 则相对稳定
Q-function
对于 Q-function, 我们也可以设计类似的算法。
对于 MC, 我们有
$$ Q^{\pi}(s,a) = \mathbb{E}^{\pi}\left[\sum_{t=0}^{T-1}\gamma^tr_t\mid s_0=s, a_0=a\right]\approx \frac1N\sum_{i=1}^N\sum_{t=0}^{T^{(i)}-1}\gamma^tr_t^{(i)} $$当使用模型来近似时,我们的目标函数为
$$ \min_{\phi} \mathcal{L}(\phi) =\mathbb{E}_{s\sim p_0, a\sim\pi(\cdot\mid s)}\left[\frac12\left(Q_\phi(s,a)-Q^\pi(s,a)\right)^2\right] $$对应的梯度
$$ \nabla_\phi \mathcal{L}(\phi)= \mathbb{E}_{s\sim p_0}^\pi\left[\left(Q_\phi(s_0,a_0)-\sum_{t=0}^{T-1}\gamma^tr_t\right)\nabla_\phi Q_\phi(s_0,a_0)\right] $$下面是对应的算法
MC
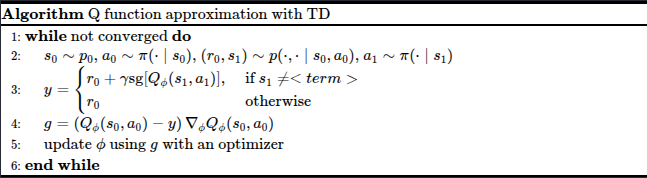
1-step Q-function TD learning
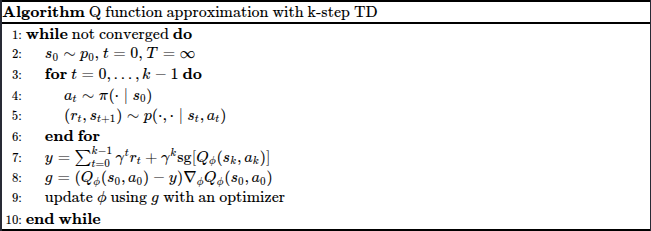
k-step Q-function TD learning
Conclusion
在本节中,我们介绍了给定 policy $\pi$, 我们如何求解对应的 value function 和 Q-function.